最新公告: 诚信为本,市场在变,诚信永远不变...

 全国服务热线
全国服务热线






400-118-5886
实践学习和算法研究
以下红色部分模块可在本实践平台学习和实践,还有更多开源项目和实例也可用于本实验平台

Autoware 框架图和实践项目
无人驾驶平台参数 | ||
1:尺寸(含防撞) | 1500*780*400(MM) | 可带支架 |
2:电机功率(可定制) | 800w*1 | |
3:电池容量 | 48V 30AH | |
4:整车重量 | 70KG | |
5:续航时间 | >3H | |
6:最大载重(可定制) | 100KG | |
7:行驶速度 | 20KM/H | |
8:驱动方式 | 前转向(阿克曼线控) | |
9:急停按钮 | 支持 | |
10:传感器类型 | 速度和角度 编码器 | |
11:系统通讯接口 | CAN通讯/232串口 | |
12:最小转弯半径 | 2.3M | |
13:控制精度 | 1% | |
14:越障 | 8-10CM | |
15:最大爬坡负载 | 15° | |
16:对外供电 | 24V/12V | |
17:悬挂类型 | 双叉臂独立悬挂 | |
18:适应地形 | 室内外全地形 | |
19:制动方式 | 电机制动/鼓刹制动 | |

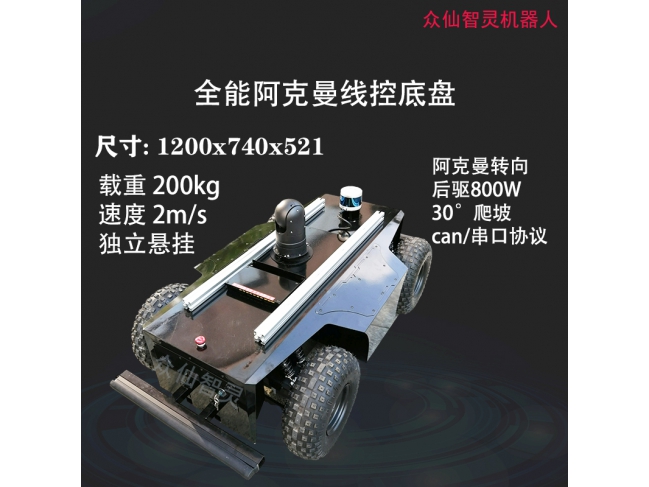
无人车底盘
该底盘车是前转向的阿克曼结构,四轮减震弹簧独立悬挂,底盘自带传感器支架配件,提供激光雷达,摄像头,GPS相关安装支架,可快速安装二次开发使用。内部提供高精度的速度和角度反馈编码器。
底盘内置MCU核心控制模块,可独立完成底盘运动解算和实时运动控制闭环,精准控制转速,并实时监控车载信息。
提供基于CAN的控制协议数据包,用户仅需简单下发线速度和角速度指令,控制模块自主规划四轮的进给量,即可完成对底盘行进轨迹的准确控制
关于Autoware
Autoware 是全球第一款开源自动驾驶软件,起源于日本名古屋大学,目前已是全球著名的自动驾驶开源平台之一,有超过 100 个全球企业、高校和研究机构使用。系统涵盖定位、感知、 预测、决策、路径规划和控制。软件采用模块化设计,可针对不同场景进行相应增减和优化。
Autoware优势:
• 针对 L4 级别的自动驾驶能力,已具备完备的核心功能
• Gitlab 全开放代码
• 部署简易,两天上手
• 丰富的线上学习资源,全球顶尖的开发者社区
• 基于 ROS 开源平台搭建,支持 ROS 开发环境
• 采用 Apache2.0 许可,支持二次开发,自主封装应用
• 开放的高精度地图工具,实现本地采图、建图、制图
提供开源自动驾驶软件 Autoware 教程文档、ROS 开发指导手册、底盘与上位机通信的CAN协议说明文档、科研项目案例文档等。并提供自动驾驶软件Autoware如下实例教程
1. autoware教程-加载地图数据
2. autoware教程-图像目标物体检测
3.autoware教程-交通信号灯识别
4.autoware教程-地图创建
5.autoware教程-路径规划
6.autoware教程-自动避障
7.autoware教程-视觉物体检测
8.autoware教程-本地路径规划
9.autoware教程-数据录制和回放
10.autoware教程-点云地图创建
11.autoware教程-雷达目标检测
12.autoware教程-路径跟随
13.autoware教程-人脸识别
14.autoware教程-加载点云图和向量图
15.autoware教程-使用GNSS进行定位
16.autoware教程-使用rosbag数据进行激光点云定位
17.autoware教程-全局路径规划
18.autoware教程-对象跟踪
19.autoware教程-转向控制
20.autoware教程-制动控制
21.autoware教程-Autoware基本使用教程
22.autoware教程-使用gnss卫星定位
23.autoware教程-获取点云数据
24.autoware教程-目标信息获取
25.autoware教程-车道检测
提供远在线培训和技术支持,包含如下项目:
1. 远程视频协助操作使用小车平台和使用注意事项
1. 远程视频协助使用遥控器控制小车平台行走
2. 协助完成平台外围设备安装
3. 协助完成 Autoware 开源软件简单使用
4. 协助完成 Autoware 自动驾驶软件与底盘对接调试
5. 协助完成 Autoware的高精度地图创建
6. 协助完成Autoware的自动导航、路径规划使用
7.协助解决科研试验中遇到的问题